Die Digitalanzeige
Wer kennt das nicht, man hat eine Drehbank oder Fräsmaschine mit einer "komischen" Spindelsteigung von z.B 0,8mm/Umdrehung.
Wieviele Umdrehungen muss man doch gleich für einen Verfahrweg von 5,5mm machen???
Um lästigen Rechnereien ein Ende zu bereiten, wurde diese Anzeige entwickelt.
Schaltplan
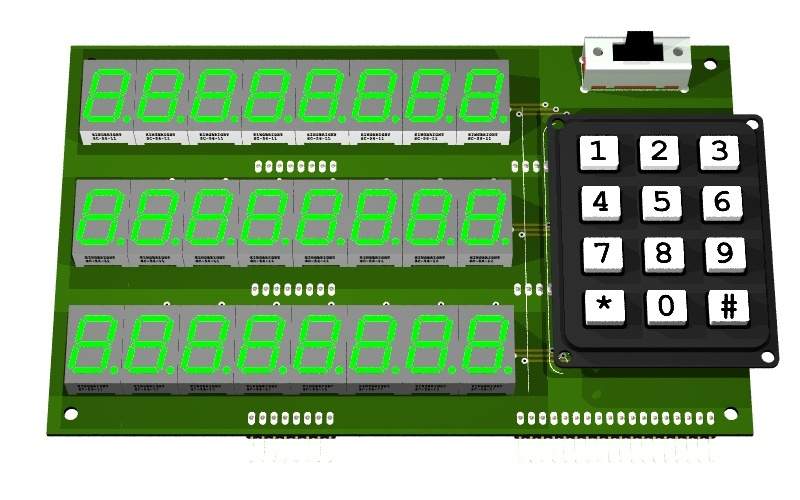
Die Anzeige besteht aus einer Displayplatine und drei identischen Controllerplatinen. Die Steuerung für je eine Zeile übernimmt ein Mikrocontroller aus dem Hause Atmel. Eingaben sind über eine Zifferntastatur möglich. Um auswählen zu können welche Zeile über die Tastatur bedient werden soll, ist ein zusätzlicher Schalter auf der Displayplatine angebracht. Die Tastatur wird über 4066 ICs an die entsprechende Controllerplatine durchgeschaltet. Die einzelnen Anoden der Siebensegmentanzeigen sind zu einem Bussystem zusammengefasst und werden über die Kathoden gemultiplext. Das spart Ausgänge am Controller und senkt den Stromverbrauch.Schaltplan der Displayplatine
 |
Schaltplan der Controllerplatine
 |
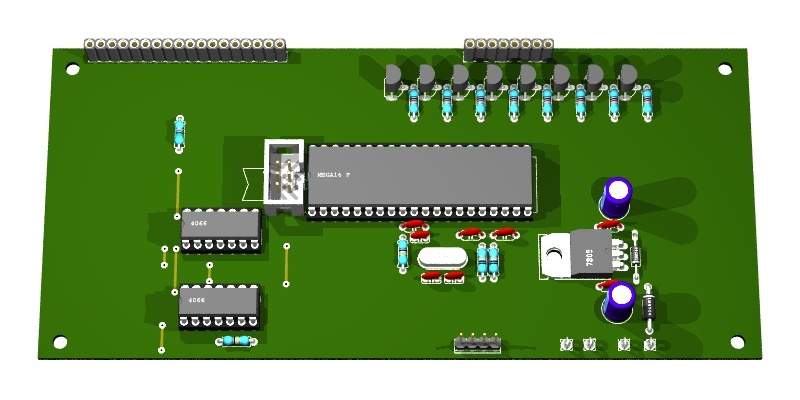
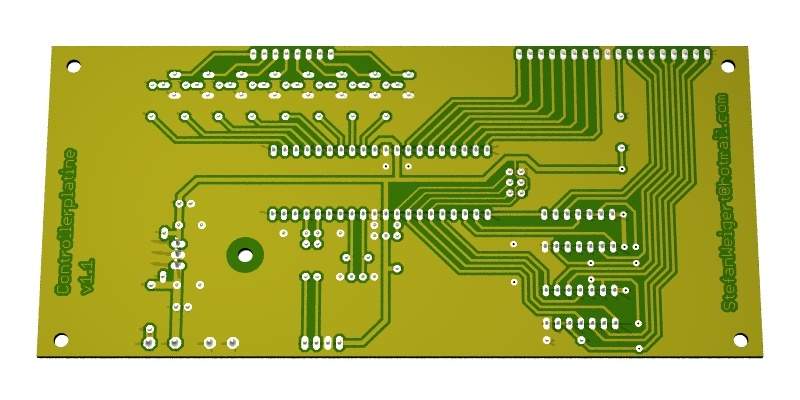
Platine
Die Platine wurde mit dem Layoutprogramm EAGLE erstellt. Mit dem, für die private Nutzung kostenfreien, ULP von www.matwei.de ist es möglich 3D-Bilder der Platine zu erzeugen. Dieses ULP erzeugt eine Datei, welche mit dem ebenfalls kostenfreien Programm POV-Ray in ein 3D-Bild gerendert werden kann. Die 3D-Marcos für die Siebensegmentanzeigen, die Tastatur und den Schalter wurden von mir erstellt.Displayplatine
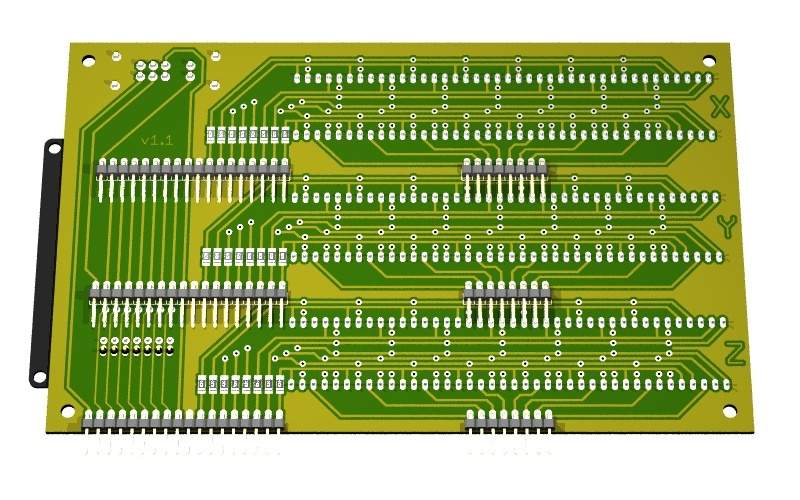
Controllerplatine
Die Ätzvorlagen gibts hier. (Achtung: Diese sind bereits gespiegelt, sodass sie direkt auf eine Folie gedruckt werden können!!!)
Die Platine für das Display ist mit einer Menge Drahtbrücken zu bestücken. Für den der sich diese Arbeit ersparen will, habe ich auch die Ätzvorlage für eine Doppelseitige Platine generiert. Die Vorlagen sind schon gespiegelt, sodass jeweils die bedruckte Seite direkt auf dem Platinenmaterial liegen muss.
Da man auf den Bildern die Drahtbrücken nicht alle erkennen kann, hier noch eine Bestückungshilfe:
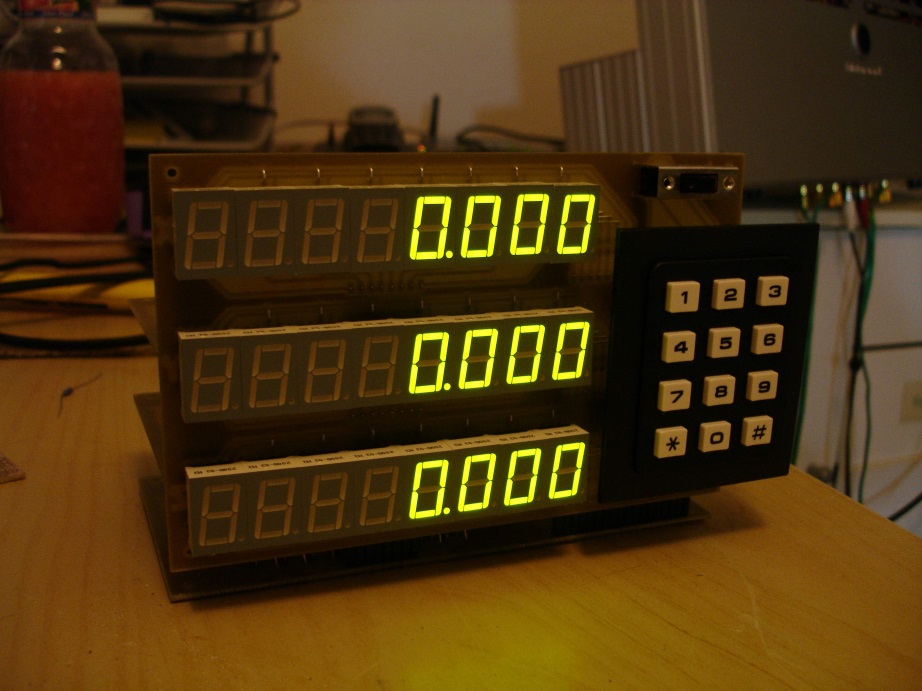
Bilder der realen Digitalanzeige
Sensoren
Die Controllerplatinen haben einen vierpoligen Anschluss für verschiedene Sensoren (+5V, Masse, Eingang1, Eingang2).Bisher wurde der Prototyp mit einem optischen Inkremental-Impulsgeber (Wegerfassung) und einem Hall-Sensor(Drehzahlerfassung) getestet.
1. Inkremental-Impulsgeber (Encoder)
Funktionsweise:
Dreht man die Schlitzscheibe nach rechts, so wird zuerst Sensor 1 beleuchtet und nach einer gewissen Zeit erst Sensor 2. Sensor 1 wird auch zuerst wieder im Schatten sein, während Sensor 2 noch eine Zeit weiterbeleuchtet wird. Dreht man die Schlitzscheibe nach links kehrt sich der Prozess um. Mit diesen Informationen kommt man zu folgenden Signaldiagrammen:
Linkslauf:
Rechtslauf:
Um eine ausreichende Auflösung zu erreichen, sollte ein Sensor mit mindestens 500 Impulsen/Umdrehung verwendet werden (besser 1000 oder 2000).
Mit 500 Impulsen meint der Hersteller 500 Löcher in der Schlitzscheibe. Bei diesem Projekt werden die steigende und die fallende Flanke der Sensoren ausgewertet, bei zwei Sensoren sind das in diesem Beispiel 2000 Flanken/Umdrehung also eine "Vervierfachung" der Auflösung.
Der Encoder wird nicht, wie man vermuten könnte mit der Spindel verbunden, sondern direkt mit dem Schlitten.
Das ganze muss jetzt "nur" noch spielfrei sein.

2. Hall-Sensor
Der hier verwendete Sensor TLE4905L ist eigentlich nicht nur ein reiner Hall-Sensor, er beinhaltet zusätzlich einen Verstärker und eine Schmitt-Trigger-Stufe für den Ausgang. Es steht also ein digitales Signal zur Verfügung. Der Sensor wurde nach dem Applikationsvorschlag im Datenblatt angeschlossen, der Lastwiderstand RL wird als Pullup im Controller programmiert. Für die Drehzahlmessung ist ein Eingang an der Controllerplatine ausreichend, der andere wird einfach offen gelassen. Zur Abnahme der Drehzahl wird ein Magnet an die Welle der Maschine angebracht. Der Sensor wird in geringem Abstand zum Magnet an der Maschine fixiert.
Programmierung
!!! Die Programme befinden sich im Moment noch in der Testphase !!!Quellcode für die Wegerfassung: (Syntax highlighted mit
G
e
S
H
i
mit Anpassungen für BascomAVR von mir)
' *****************************************
' * Wegerfassung für eine Drehbank *
' * mit ATMega 16 *
' * Version 1.1a *
' * © by Stefan Weigert *
' *****************************************
' Beschaltung
' PortA.0...A.7 Ansteuerung der Anoden der 7-Segmentanzeigen über 100R A.0=a A.1=b ... A.7=dp
' PortC.0...C.7 Ansteuerung der gemeinsamen Kathoden der Anzeigen C.0=MSB C.7=LSB über Transistor
' PortB.0...B.7 über 4066 an Tastaturmatrix
' PortD.0...D.1 frei
' PortD.2 (INT0) Inkrementalgeber
' PortD.3 (INT1) Inkrementalgeber
' PortD.4...D.6 frei
$regfile = "m16def.dat" 'Dem Compiler vorgeben welcher Controller benutzt wird
$crystal = 16000000 'Taktfrequenz in Hz vorgeben
Ddra = &B11111111 'PortA alles Ausgänge
Ddrb = &B00000000 'PortB alles Eingänge
Ddrc = &B11111111 'PortC alles Ausgänge
Ddrd = &B00000000 'PortD alles Eingänge
Portd = &B00001100 'Pullups für INT0 und INT1 setzen
Mcucr = &B00000101 'INT0 und INT1 auf steigende UND fallende Flanke einstellen
Gicr = &B11000000 'INT0 und INT1 aktivieren
On Int0 Interrupt0 'Sprungadresse für INT0 definieren
On Int1 Interrupt1 'Sprungadresse für INT1 definieren
Config Kbd = Portb , Debounce = 30 'Tastaturmatrix mit Entprellzeit definieren
Dim Eeprom_dummybyte As Eram Byte At &H00 'Das erste Byte im EEProm könnte bei einem Reset verfälscht werden
Dim Eeprom_durchmesserflag As Eram Byte At &H01 'Speichervariable im EEProm = 1 wenn Durchmesser angezeigt werden sollen
Dim Eeprom_richtungsflag As Eram Byte At &H02 'Speichervariable im EEprom rechts/links addieren/subtrahieren
Dim Eeprom_schrittwert As Eram Long At &H03 'Speichervariable im EEprom für Wert für einen Schritt des Inkrementalgebers
$eepromhex 'den Compiler anweisen den EEProminhalt im Intel-Hex-Format auszugeben
$eeprom 'die folgenden Daten werden im EEProm gespeichert
Data 0 , 0 , 0 , 1000& 'Daten für das EEprom (Byte , Byte, Byte , Long) Grundeinstellungen
$data 'den Compiler anweisen, dass weitere Daten in den
'Flash-Speicher abgelegt werden sollen
Dim N As Word At &H60 'n = allgemeine Zählvariable
Dim Stelle As Byte At &H62 'Schleifenvariable für die Stellenauswahl
Dim Encoderstatusalt As Byte At &H63 'Variable für den "alten" Encoderstatus
Dim Encoderstatusneu As Byte At &H64 'Variable für den "neuen" Encoderstatus
Dim Schrittwert As Long At &H65 'Variable für den Encoderschritt in Nanometer
Dim Taste As Byte At &H69 'Variable für die Tastenauswahl
Dim Menuepunkt As Byte At &H70
Dim Messwert As Long At &H71 'angezuzeigender Wert
Dim Anzeigewert As Long At &H75
Dim Anzeigewertascii As String * 8 At &H79 'Zeichenkette des anzuzeigenden Wertes (Textes)
Dim Asciizeichen(8) As Byte At &H79 Overlay 'Byteweise Ausgabe ermöglichen
Dim Kommaflag As Bit At &H88 'Flag bei 1 wird das Komma dargestellt
Displaytest:
For Encoderstatusalt = 0 To 3
Anzeigewertascii = Lookupstr(encoderstatusalt , Testwerte)
For N = 1 To 1500
Gosub Anzeigen
Next N
Next Encoderstatusalt
Init:
Encoderstatusalt = Pind And 12 'INT0 und INT1 ausmaskieren
Schrittwert = Eeprom_schrittwert '0 .. +32767 in Nanometer
If Eeprom_durchmesserflag = 1 Then
Schrittwert = Schrittwert * 2
End If
If Eeprom_richtungsflag = 1 Then
Schrittwert = Schrittwert * -1
End If
Messwert = 0 'Startwert
Enable Interrupts 'Interrupts global feischalten
Main:
Do
Kommaflag = 1 'Flag = 1 wenn ein Komma angezeigt werden soll
Gosub Messwerttest
Gosub Anzeigen
Taste = Getkbd()
If Taste = 13 Then
Gosub Hauptmenue
End If
Loop
Messwerttest:
Anzeigewert = Messwert
If Anzeigewert > 2145000000 Or Anzeigewert < -2145000000 Then
Disable Interrupts
Kommaflag = 0
Anzeigewertascii = "FLoAtEd "
For N = 0 To 2500
Gosub Anzeigen
Next N
Messwert = 0
Enable Interrupts
Elseif Anzeigewert > 2100000000 Or Anzeigewert < -2100000000 Then
Kommaflag = 0
Anzeigewertascii = "FLoAtinG"
Elseif Anzeigewert > 0 Then
Anzeigewertascii = Str(anzeigewert)
Gosub Ruecken
Elseif Anzeigewert < 0 Then
Anzeigewert = Anzeigewert * -1
Anzeigewertascii = Str(anzeigewert)
Gosub Ruecken
Asciizeichen(1) = 45 'negatives Vorzeichen
Else
Anzeigewertascii = " 0000"
End If
Return
Anzeigen: 'Anzeige in Abhängigkeit der gespeicherten Asciizeichen die Segmente schalten
For Stelle = 0 To 7
Select Case Asciizeichen(stelle + 1)
Case 45 : Porta = 64 '-
Case 48 : Porta = 63 '0
Case 49 : Porta = 6 '1
Case 50 : Porta = 91 '2
Case 51 : Porta = 79 '3
Case 52 : Porta = 102 '4
Case 53 : Porta = 109 '5
Case 54 : Porta = 125 '6
Case 55 : Porta = 39 '7
Case 56 : Porta = 127 '8
Case 57 : Porta = 111 '9
Case 65 : Porta = 119 'A
Case 67 : Porta = 57 'C
Case 69 : Porta = 121 'E
Case 70 : Porta = 113 'F
Case 71 : Porta = 125 'G
Case 72 : Porta = 118 'H
Case 73 : Porta = 6 'I
Case 76 : Porta = 56 'L
Case 80 : Porta = 115 'P
Case 83 : Porta = 109 'S
Case 85 : Porta = 62 'U
Case 98 : Porta = 124 'b
Case 99 : Porta = 88 'c
Case 100 : Porta = 94 'd
Case 104 : Porta = 116 'h
Case 105 : Porta = 4 'i
Case 110 : Porta = 84 'n
Case 111 : Porta = 92 'o
Case 114 : Porta = 80 'r
Case 116 : Porta = 120 't
Case 117 : Porta = 28 'u
Case 121 : Porta = 110 'y
Case Else : Porta = 0
End Select
If Stelle = 4 And Kommaflag = 1 Then
Porta = Porta + 128
End If
Portc.stelle = 1
Waitus 100
Portc.stelle = 0
Next Stelle
Return
Ruecken:
Asciizeichen(8) = Asciizeichen(7) 'einmal auf jeden Fall Rücken (Vorzeichenstelle)
Asciizeichen(7) = Asciizeichen(6)
Asciizeichen(6) = Asciizeichen(5)
Asciizeichen(5) = Asciizeichen(4)
Asciizeichen(4) = Asciizeichen(3)
Asciizeichen(3) = Asciizeichen(2)
Asciizeichen(2) = Asciizeichen(1)
Asciizeichen(1) = 0
If Anzeigewert < 1000000000 Then
Asciizeichen(8) = Asciizeichen(7)
Asciizeichen(7) = Asciizeichen(6)
Asciizeichen(6) = Asciizeichen(5)
Asciizeichen(5) = Asciizeichen(4)
Asciizeichen(4) = Asciizeichen(3)
Asciizeichen(3) = Asciizeichen(2)
Asciizeichen(2) = 0
End If
If Anzeigewert < 100000000 Then
Asciizeichen(8) = Asciizeichen(7)
Asciizeichen(7) = Asciizeichen(6)
Asciizeichen(6) = Asciizeichen(5)
Asciizeichen(5) = Asciizeichen(4)
Asciizeichen(4) = Asciizeichen(3)
Asciizeichen(3) = 0
End If
If Anzeigewert < 10000000 Then
Asciizeichen(8) = Asciizeichen(7)
Asciizeichen(7) = Asciizeichen(6)
Asciizeichen(6) = Asciizeichen(5)
Asciizeichen(5) = Asciizeichen(4)
Asciizeichen(4) = 0
End If
If Anzeigewert < 1000000 Then
Asciizeichen(8) = Asciizeichen(7)
Asciizeichen(7) = Asciizeichen(6)
Asciizeichen(6) = Asciizeichen(5)
Asciizeichen(5) = 48
End If
If Anzeigewert < 100000 Then
Asciizeichen(8) = Asciizeichen(7)
Asciizeichen(7) = Asciizeichen(6)
Asciizeichen(6) = 48
End If
If Anzeigewert < 10000 Then
Asciizeichen(8) = Asciizeichen(7)
Asciizeichen(7) = 48
End If
Return
Hauptmenue:
Kommaflag = 0
Menuepunkt = 0
Do
Taste = Getkbd()
Select Case Taste
Case 12 : Exit Do
Case 13 :
If Menuepunkt < 7 Then Incr Menuepunkt Else Menuepunkt = 1
Select Case Menuepunkt
Case 1 : Anzeigewertascii = "nuLL "
Case 2 : Anzeigewertascii = "PrESEt "
Case 3 : Anzeigewertascii = "diA on "
Case 4 : Anzeigewertascii = "diA oFF "
Case 5 : Anzeigewertascii = "StEP SEt"
Case 6 : Anzeigewertascii = "StEP UP "
Case 7 : Anzeigewertascii = "StEP dn "
End Select
Case 14:
Select Case Menuepunkt
Case 1 :
Messwert = 0
Gosub Done
Kommaflag = 1
Return
Case 2 :
Gosub Preset
Kommaflag = 1
Return
Case 3 :
Eeprom_durchmesserflag = 1
Schrittwert = Eeprom_schrittwert
Schrittwert = Schrittwert * 2
If Eeprom_richtungsflag = 1 Then
Schrittwert = Schrittwert * -1
End If
Gosub Done
Kommaflag = 1
Return
Case 4 :
Eeprom_durchmesserflag = 0
Schrittwert = Eeprom_schrittwert
If Eeprom_richtungsflag = 1 Then
Schrittwert = Schrittwert * -1
End If
Gosub Done
Kommaflag = 1
Return
Case 5 :
Gosub Stepset
Kommaflag = 1
Return
Case 6 :
Eeprom_richtungsflag = 0
Schrittwert = Eeprom_schrittwert
If Eeprom_durchmesserflag = 1 Then
Schrittwert = Schrittwert * 2
End If
Gosub Done
Kommaflag = 1
Return
Case 7 :
Eeprom_richtungsflag = 1
Schrittwert = Eeprom_schrittwert
Schrittwert = Schrittwert * -1
If Eeprom_durchmesserflag = 1 Then
Schrittwert = Schrittwert * 2
End If
Gosub Done
Kommaflag = 1
Return
End Select
End Select
Gosub Nokey
Gosub Anzeigen
Loop
Return
Preset:
Disable Interrupts
Messwert = 0
Gosub Messwerttest
Gosub Anzeigen
Gosub Nokey
Do
Taste = Getkbd()
Select Case Taste
Case 0 : '1
If Messwert <= 214499900 And Messwert >= -214499900 Then
Messwert = Messwert * 10
If Messwert < 0 Then Messwert = Messwert - 1000 Else Messwert = Messwert + 1000
Else
Gosub Error
End If
Case 1 : '2
If Messwert <= 214499800 And Messwert >= -214499800 Then
Messwert = Messwert * 10
If Messwert < 0 Then Messwert = Messwert - 2000 Else Messwert = Messwert + 2000
Else
Gosub Error
End If
Case 2 : '3
If Messwert <= 214499700 And Messwert >= -214499700 Then
Messwert = Messwert * 10
If Messwert < 0 Then Messwert = Messwert - 3000 Else Messwert = Messwert + 3000
Else
Gosub Error
End If
Case 4 : '4
If Messwert <= 214499600 And Messwert >= -214499600 Then
Messwert = Messwert * 10
If Messwert < 0 Then Messwert = Messwert - 4000 Else Messwert = Messwert + 4000
Else
Gosub Error
End If
Case 5 : '5
If Messwert <= 214499500 And Messwert >= -214499500 Then
Messwert = Messwert * 10
If Messwert < 0 Then Messwert = Messwert - 5000 Else Messwert = Messwert + 5000
Else
Gosub Error
End If
Case 6 : '6
If Messwert <= 214499400 And Messwert >= -214499400 Then
Messwert = Messwert * 10
If Messwert < 0 Then Messwert = Messwert - 6000 Else Messwert = Messwert + 6000
Else
Gosub Error
End If
Case 8 : '7
If Messwert <= 214499300 And Messwert >= -214499300 Then
Messwert = Messwert * 10
If Messwert < 0 Then Messwert = Messwert - 7000 Else Messwert = Messwert + 7000
Else
Gosub Error
End If
Case 9 : '8
If Messwert <= 214499200 And Messwert >= -214499200 Then
Messwert = Messwert * 10
If Messwert < 0 Then Messwert = Messwert - 8000 Else Messwert = Messwert + 8000
Else
Gosub Error
End If
Case 10 : '9
If Messwert <= 214499100 And Messwert >= -214499100 Then
Messwert = Messwert * 10
If Messwert < 0 Then Messwert = Messwert - 9000 Else Messwert = Messwert + 9000
Else
Gosub Error
End If
Case 12 : '+/-
Messwert = Messwert * -1
Case 13 : '0
If Messwert <= 214500000 And Messwert >= -214500000 Then
Messwert = Messwert * 10
Else
Gosub Error
End If
Case 14 : Exit Do 'Enter
End Select
Gosub Messwerttest
Gosub Nokey
Gosub Anzeigen
Loop
Gosub Done
Enable Interrupts
Return
Stepset:
Disable Interrupts
Messwert = 0
Gosub Messwerttest
Gosub Anzeigen
Gosub Nokey
Do
Taste = Getkbd()
Select Case Taste
Case 0 : '1
If Messwert <= 3276000 Then
Messwert = Messwert * 10
Messwert = Messwert + 1000
Else
Gosub Error
End If
Case 1 : '2
If Messwert <= 3276000 Then
Messwert = Messwert * 10
Messwert = Messwert + 2000
Else
Gosub Error
End If
Case 2 : '3
If Messwert <= 3276000 Then
Messwert = Messwert * 10
Messwert = Messwert + 3000
Else
Gosub Error
End If
Case 4 : '4
If Messwert <= 3276000 Then
Messwert = Messwert * 10
Messwert = Messwert + 4000
Else
Gosub Error
End If
Case 5 : '5
If Messwert <= 3276000 Then
Messwert = Messwert * 10
Messwert = Messwert + 5000
Else
Gosub Error
End If
Case 6 : '6
If Messwert <= 3276000 Then
Messwert = Messwert * 10
Messwert = Messwert + 6000
Else
Gosub Error
End If
Case 8 : '7
If Messwert <= 3276000 Then
Messwert = Messwert * 10
Messwert = Messwert + 7000
Else
Gosub Error
End If
Case 9 : '8
If Messwert <= 3275000 Then
Messwert = Messwert * 10
Messwert = Messwert + 8000
Else
Gosub Error
End If
Case 10 : '9
If Messwert <= 3275000 Then
Messwert = Messwert * 10
Messwert = Messwert + 9000
Else
Gosub Error
End If
Case 12 : Exit Do
Case 13 : '0
If Messwert <= 3276000 Then
Messwert = Messwert * 10
Else
Gosub Error
End If
Case 14 : Exit Do 'Enter
End Select
Gosub Messwerttest
Gosub Nokey
Gosub Anzeigen
Loop
If Taste = 14 Then
Messwert = Messwert / 1000
Eeprom_schrittwert = Messwert
Schrittwert = Eeprom_schrittwert
If Eeprom_durchmesserflag = 1 Then
Schrittwert = Schrittwert * 2
End If
If Eeprom_richtungsflag = 1 Then
Schrittwert = Schrittwert * -1
End If
Gosub Done
End If
Messwert = 0
Enable Interrupts
Return
Nokey:
Do
Taste = Getkbd()
Gosub Anzeigen
Loop Until Taste = 16
Return
Error:
Anzeigewertascii = "Error "
For N = 0 To 600
Gosub Anzeigen
Next N
Return
Done:
Anzeigewertascii = " donE"
For N = 0 To 600
Gosub Anzeigen
Next N
Return
Interrupt0:
Disable Interrupts
Encoderstatusneu = Pind And 12
Select Case Encoderstatusalt
Case 0 : Messwert = Messwert + Schrittwert
Case 4 : Messwert = Messwert - Schrittwert
Case 8 : Messwert = Messwert - Schrittwert
Case 12 : Messwert = Messwert + Schrittwert
End Select
Encoderstatusalt = Encoderstatusneu
Enable Interrupts
Return
Interrupt1:
Disable Interrupts
Encoderstatusneu = Pind And 12
Select Case Encoderstatusalt
Case 0 : Messwert = Messwert - Schrittwert
Case 4 : Messwert = Messwert + Schrittwert
Case 8 : Messwert = Messwert + Schrittwert
Case 12 : Messwert = Messwert - Schrittwert
End Select
Encoderstatusalt = Encoderstatusneu
Enable Interrupts
Return
Testwerte:
Data "diSPLAy " , "tESt " , "88888888" , "LEnGth "Quellcode für die Drehzahlerfassung: (Syntax highlighted mit
G
e
S
H
i
mit Anpassungen für BascomAVR von mir)' ********************************************** ' * Drehzahlerfassung an einer Drehbank * ' * mit ATMega 16 * ' * Version 1.1a * ' * © by Stefan Weigert * ' ********************************************** ' Beschaltung ' PortA.0...A.7 Ansteuerung der Anoden der 7-Segmentanzeigen über 82R A.0=a A.1=b ... A.7=dp ' PortC.0...C.7 Ansteuerung der gemeinsamen Kathoden der Anzeigen C.0=MSB C.7=LSB über Transistor ' PortB.0...B.7 über 4066 an Tastaturmatrix ' PortD.0...D.1 frei ' PortD.2 (INT0) Drehzahlsensor (z.B.Hallsensor) mit 1Impuls pro Umdrehung ' PortD.3...D.6 frei $regfile = "m16def.dat" 'Dem Compiler vorgeben welcher Controller benutzt wird $crystal = 16000000 'Taktfrequenz in Hz vorgeben Ddra = &B11111111 'PortA alles Ausgänge Ddrb = &B00000000 'PortB alles Eingänge Ddrc = &B11111111 'PortC alles Ausgänge Ddrd = &B00000000 'PortD alles Eingänge Portd.2 = 1 'Pullup für INT0 setzen Mcucr = &B00000011 'INT0 auf steigende Flanke einstellen Dim Zeitwert As Long At &H60 'Zeitwert zwischen zwei Sensorimpulsen Dim Zeitwertlow As Word At &H60 Overlay 'HighWord des Zeitwertes wird durch Timerüberlauf erhöht Dim Zeitwerthigh As Word At &H62 Overlay 'LowWord des Zeitwertes ist der Timerstand selbst Dim Drehzahlascii As String * 8 At &H64 'Zeichenkette des anzuzeigenden Wertes (Textes) Dim Asciizeichen(8) As Byte At &H64 Overlay 'Byteweise Ausgabe ermöglichen Dim Drehzahl As Long At &H72 'Variable für die Drehzahl Dim N As Word At &H76 'n = allgemeine Zählvariable Dim Stelle As Byte At &H78 'Schleifenvariable für die Stellenauswahl Dim Anzeigewert As Long At &H79 Config Timer1 = Timer , Prescale = 8 'Timer1 (16Bit) als Timer konfigurieren und mit 1/8 des Systemtaktes betreiben On Ovf1 Timerueberlauf1 'Bei Timerüberlauf (alle 500µs) zur Subroutine 'Timerueberlauf1' springen On Int0 Interrupt0 'Sprungadresse für INT0 definieren Enable Ovf1 'TimerInterrupt1 aktivieren Enable Int0 Displaytest: For Zeitwert = 0 To 3 Drehzahlascii = Lookupstr(zeitwert , Testwerte) For N = 1 To 1500 Gosub Anzeigen Next N Next Zeitwert Enable Interrupts 'Interrupts global feischalten Init: Zeitwert = 0 Anzeigewert = 0 Drehzahl = 0 Stop Timer1 Timer1 = 0 Start Timer1 Main: Do Anzeigewert = Drehzahl If Anzeigewert > 99999 Then Drehzahlascii = "to HiGh " Else Drehzahlascii = Str(anzeigewert) Gosub Ruecken End If For N = 1 To 400 Gosub Anzeigen Next N Loop Anzeigen: For Stelle = 0 To 7 Select Case Asciizeichen(stelle + 1) 'Anzeige in Abhängigkeit der gespeicherten Asciizeichen die Segmente schalten Case 45 : Porta = 64 '- Case 48 : Porta = 63 '0 Case 49 : Porta = 6 '1 Case 50 : Porta = 91 '2 Case 51 : Porta = 79 '3 Case 52 : Porta = 102 '4 Case 53 : Porta = 109 '5 Case 54 : Porta = 125 '6 Case 55 : Porta = 39 '7 Case 56 : Porta = 127 '8 Case 57 : Porta = 111 '9 Case 65 : Porta = 119 'A Case 67 : Porta = 57 'C Case 69 : Porta = 121 'E Case 70 : Porta = 113 'F Case 71 : Porta = 125 'G Case 72 : Porta = 118 'H Case 73 : Porta = 6 'I Case 76 : Porta = 56 'L Case 80 : Porta = 115 'P Case 83 : Porta = 109 'S Case 85 : Porta = 62 'U Case 98 : Porta = 124 'b Case 99 : Porta = 88 'c Case 100 : Porta = 94 'd Case 104 : Porta = 116 'h Case 105 : Porta = 4 'i Case 110 : Porta = 84 'n Case 111 : Porta = 92 'o Case 114 : Porta = 80 'r Case 116 : Porta = 120 't Case 117 : Porta = 28 'u Case 121 : Porta = 110 'y Case Else : Porta = 0 End Select Portc.stelle = 1 Waitus 100 Portc.stelle = 0 Next Stelle Return Ruecken: If Anzeigewert = 0 Then Drehzahlascii = " 0 U" Return End If Asciizeichen(8) = 85 Asciizeichen(7) = 0 If Anzeigewert < 100000 Then Asciizeichen(6) = Asciizeichen(5) Asciizeichen(5) = Asciizeichen(4) Asciizeichen(4) = Asciizeichen(3) Asciizeichen(3) = Asciizeichen(2) Asciizeichen(2) = Asciizeichen(1) Asciizeichen(1) = 0 End If If Anzeigewert < 10000 Then Asciizeichen(6) = Asciizeichen(5) Asciizeichen(5) = Asciizeichen(4) Asciizeichen(4) = Asciizeichen(3) Asciizeichen(3) = Asciizeichen(2) Asciizeichen(2) = 0 End If If Anzeigewert < 1000 Then Asciizeichen(6) = Asciizeichen(5) Asciizeichen(5) = Asciizeichen(4) Asciizeichen(4) = Asciizeichen(3) Asciizeichen(3) = 0 End If If Anzeigewert < 100 Then Asciizeichen(6) = Asciizeichen(5) Asciizeichen(5) = Asciizeichen(4) Asciizeichen(4) = 0 End If If Anzeigewert < 10 Then Asciizeichen(6) = Asciizeichen(5) Asciizeichen(5) = 0 End If Return Interrupt0: Zeitwertlow = Timer1 Timer1 = 0 Drehzahl = 120000000 / Zeitwert Zeitwert = 0 Return Timerueberlauf1: Incr Zeitwerthigh If Zeitwert > 4000000 Then Disable Int0 Zeitwert = 0 Drehzahl = 0 Enable Int0 End If Return Testwerte: Data "diSPLAy " , "tESt " , "88888888" , "rotAtion"
Die fertigen Hexfiles: Wegerfassung Drehzahlerfassung
Für die Wegerfasung können und sollten noch die Grundeinstellungen ins EEProm geladen werden: Grundeinstellungen
Kurzanleitung für den Normalbetrieb (der Wegerfassung):
1. Nach dem Einschalten- es wird ein Displaytest ausgeführt
- diverse Einstellungen werden geladen
- Anzeige wird genullt
- die Digitalanzeige geht in den Normalbetrieb und würde auf Bewegungen des Encoders reagieren
Im Normalbetrieb können außer dem Verfahrweg zwei Meldungen auf dem Display erscheinen:
- die Digitalanzeige zeigt "FLoAtinG" an
Ist der Anzeigewert größer als 2100mm bzw. kleiner als -2100mm besteht die Gefahr eines internen Variablenüberlaufes.
Solange "FLoAtinG" im Display steht kann man den Messwert durch Richtungsumkehr "retten".
- die Digitalanzeige zeigt "FLoAtEd"
Der Messwert lag über 2145mm bzw. unter -2145mm.
Der Messwert ist auch nach Richtungsumkehr unbrauchbar.
2. Bedienung
- über den Schiebeschalter (3 Stufen) wird ausgewählt, welche Achse bedient werden soll
- aus dem Normalbetrieb heraus ist zunächst nur die Taste "0" der Tastatur aktiv, mit dieser gelangt man ins Menü
- Das Menü besitzt 7 Menüpunkte, welche mit der "0" durchgetoggelt werden können (nach dem letzten Menüpunkt wird wieder der erste angezeigt usw.)
Im Display werden je nach Menüpunkt unterschiedliche Texte angezeigt (rudimentär soweit es halt mit einer 7-Segmentanzeige möglich ist)
- mit der Taste "*" gelangt man zurück ins Hauptmenü
Menüpunkt 1 die Digitalanzeige zeigt "nuLL"
- wird jetzt die Taste "#" gedrückt, wird die Anzeige für diese Achse genullt
- die Digitalanzeige zeigt kurz "donE"
- die Digitalanzeige ist wieder in der Hauptmenüebene
Menüpunkt 2 die Digitalanzeige zeigt "PrESEt"
- wird jetzt die Taste "#" gedrückt, kann man einen beliebigen Wert voreinstellen (mit 1μm Genauigkeit)
- mit der Taste "*" wird das Vorzeichen getauscht
- die Ziffern sind eben die Ziffern
- Fehleingaben werden durch "Error" angezeigt und ignoriert (Wert zu groß/klein)
- mit "#" wird die Eingabe abgeschlossen
- die Digitalanzeige zeigt kurz "donE"
- die Digitalanzeige ist wieder in der Hauptmenüebene
Menüpunkt 3 die Digitalanzeige zeigt "diA on"
- wird jetzt die Taste "#" gedrückt, wird die eingestellte Schrittweite des Encoders verdoppelt (diA = Diameter = Durchmesser)
- Diese Funktion ist eigentlich nur für die Stichachse einer Drehbank sinnvoll.
- (z.B. bei einen Fahrweg von 1mm verringert den Bauteildurchmesser um 2mm ... usw.)
- die Digitalanzeige zeigt kurz "donE"
- Die Einstellung wird im EEProm gespeichert und bleibt so auch nach Ausschalten erhalten!!!
- die Digitalanzeige ist wieder in der Hauptmenüebene
Menüpunkt 4 die Digitalanzeige zeigt "diA oFF"
- wird jetzt die Taste "#" gedrückt, wird die einfache eingestellte Schrittweite des Encoders verwendet
- die Digitalanzeige zeigt kurz "donE"
- Die Einstellung wird im EEProm gespeichert und bleibt so auch nach Ausschalten erhalten!!!
- die Digitalanzeige ist wieder in der Hauptmenüebene
Menüpunkt 5 die Digitalanzeige zeigt "StEP SEt"
- wird jetzt die Taste "#" gedrückt, wird die Schrittweite des Encoders eingestellt (in nm -> ja nano!!!)
Das ist die wichtigste Einstellung an der ganzen die Digitalanzeige.
Diese Schrittweite gibt an, was eine Flanke des Encoders an Weg entspricht
(mit einem Trick kann man den Wert mittels der Digitalanzeige selbst ermitteln -> kommt später)
Fehleingaben werden durch "Error" angezeigt und ignoriert (Wert zu groß/klein)
Der Wert ist immer positiv
- Die Ziffern sind wieder die Ziffern
- mit "#" wird die Eingabe abgeschlossen
- die Digitalanzeige zeigt kurz "donE"
- Die Einstellung wird im EEProm gespeichert und bleibt so auch nach Ausschalten erhalten!!!
- die Digitalanzeige ist wieder in der Hauptmenüebene
Menüpunkt 6 die Digitalanzeige zeigt "StEP UP"
- wird jetzt die Taste "#" gedrückt, kann die Zählrichtung der die Digitalanzeige verändert werden
- was hier welcher Logik entspricht hängt auch davon ab, wo welcher Encoderkanal an der Platine angeschlossen ist.
- Sagen wir mal: beim Drehen des Enoders im Urzeigersinn zählt die Anzeige jetzt vorwärts -> entgegen rückwärts
- die Digitalanzeige zeigt kurz "donE"
- Die Einstellung wird im EEProm gespeichert und bleibt so auch nach Ausschalten erhalten!!!
- die Digitalanzeige ist wieder in der Hauptmenüebene
Menüpunkt 7 die Digitalanzeige zeigt "StEP dn"
- wird jetzt die Taste "#" gedrückt, kann die Zählrichtung der die Digitalanzeige verändert werden
- was hier welcher Logik entspricht hängt auch davon ab, wo welcher Encoderkanal an der Platine angeschlossen ist.
- Sagen wir mal: beim Drehen des Enoders im Urzeigersinn zählt die Anzeige jetzt rückwärts -> entgegen vorwärts
- die Digitalanzeige zeigt kurz "donE"
- Die Einstellung wird im EEProm gespeichert und bleibt so auch nach Ausschalten erhalten!!!
- die Digitalanzeige ist wieder in der Hauptmenüebene
3. Ermittlung und Einstellung der Encoderschrittweite
- folgende Schritte sind für jede Achse einzeln durchzuführen
- sicherstellen, dass "diA oFF" ausgewählt ist
- im Menü Stepset den Wert 1000 Einstellen (1000nm)
- den toten Gang für eine Richtung aus der Maschine fahren
- Anzeige nullen
- einen längeren (ganz genau bekannten) Weg in die gleiche Richtung fahren (10cm Lehre ?! je weiter desto besser)
- die Digitalanzeige zeigt jetzt die Schitte an, die für diesen Weg nötig waren.
Rechnen:
"ganz genau bekannter Weg" / Anzeigewert = Weite pro Schritt
Weite pro Schritt in nm umrechnen und bei "StEP SEt" einstellen -> fertig
