Die Scope Clock mit D7-16
Dieses Projekt entstand schon kurz nach dem Bau „meiner“ ersten Nixie-Uhr.
Beim Stöbern durch diverse Elektronikforen bin ich schließlich auf diese Seite gestoßen:
Scope Clock von OZ2CPU.
Die Darstellung der Uhrzeit auf einer Oszillographenröhre hat mich damals sofort fasziniert –
und tut es, ehrlich gesagt, bis heute.
Nach positiven Erfahrungen mit der Nixie-Uhr lag es nahe, mich auch an dieses Projekt zu wagen.
Die ersten Schritte
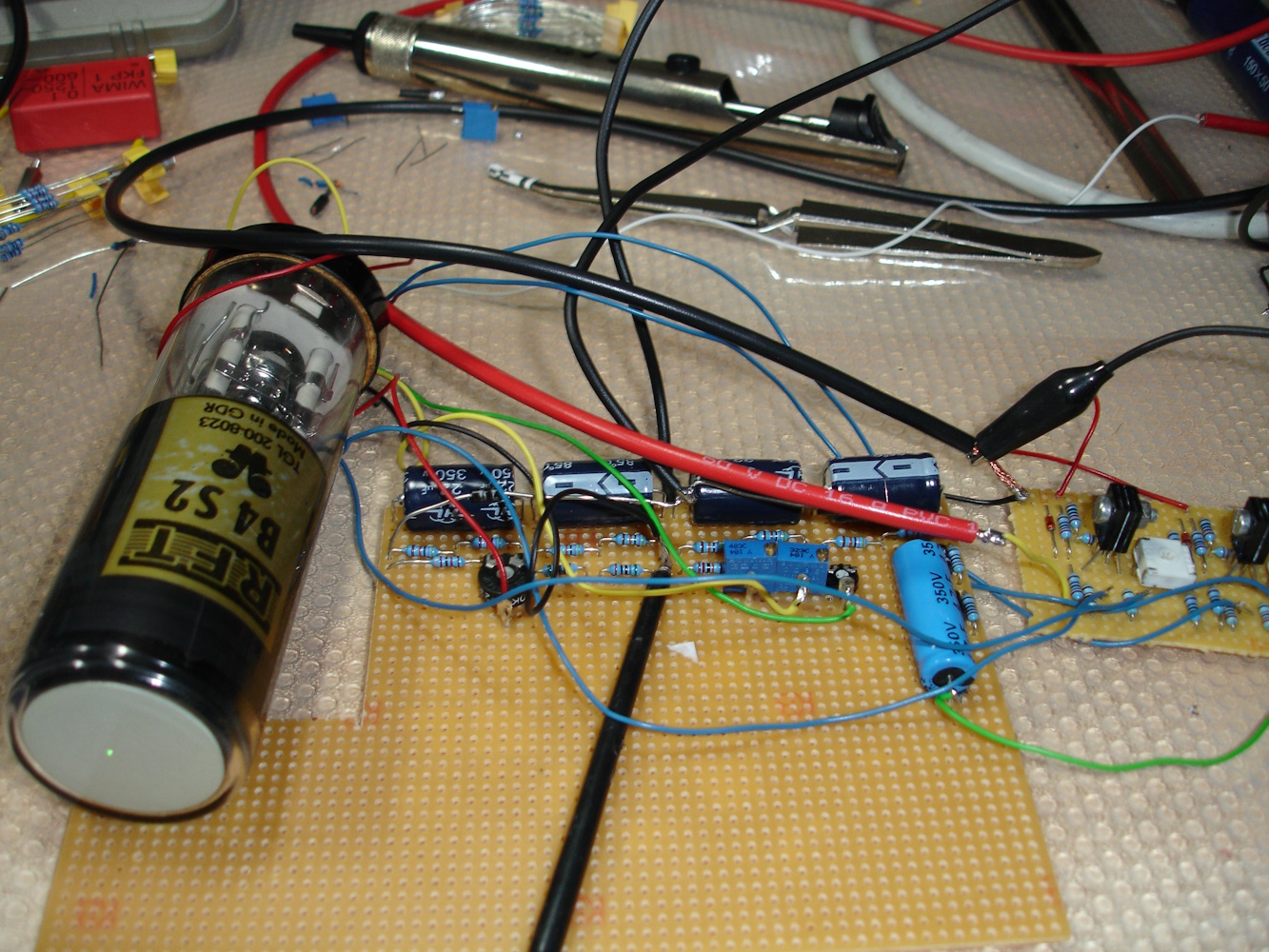
Der erste Schritt war die Beschaffung einer passenden Oszillographenröhre. Meine Wahl fiel zunächst auf eine Röhre vom Typ B4S2 der Firma RFT.

RFT B4S2 |
Ich begann mit den eher unscheinbaren Baugruppen - der Hochspannungserzeugung und den Ablenkstufen.
Beides entstand im fliegendenden Versuchsaufbau. Ziel war es, die Röhre überhaupt erst einmal zum Leuchten zu bringen
und ein stabiles Ablenksystem aufzubauen.
Alle Gitter wurden mit den nötigen Spannungen versorgt, ganz klassisch über einfache Spannungsteiler.
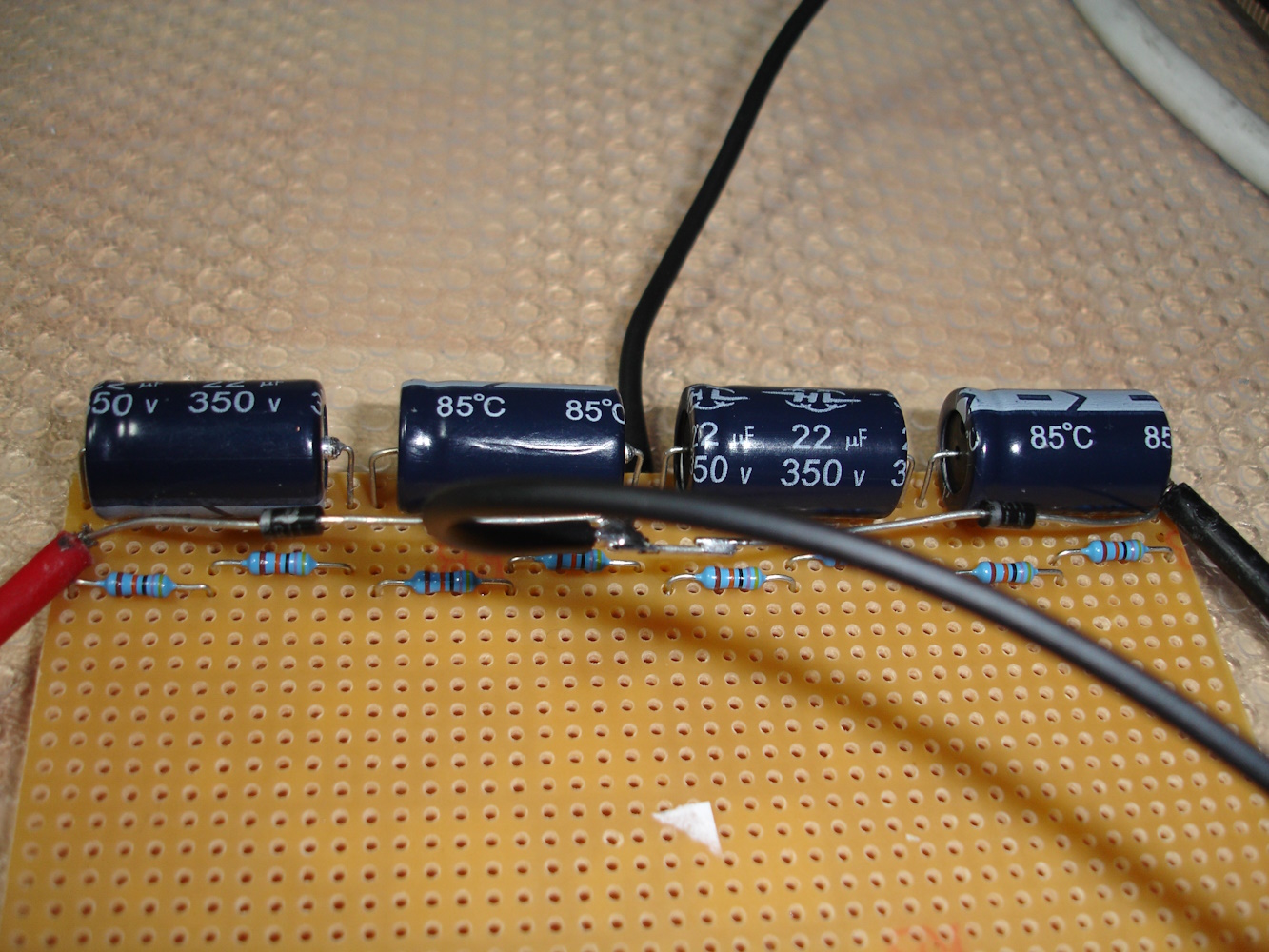
Hochspannungsteil erste Version |

Spannungsmessung mit genügend Reserve |
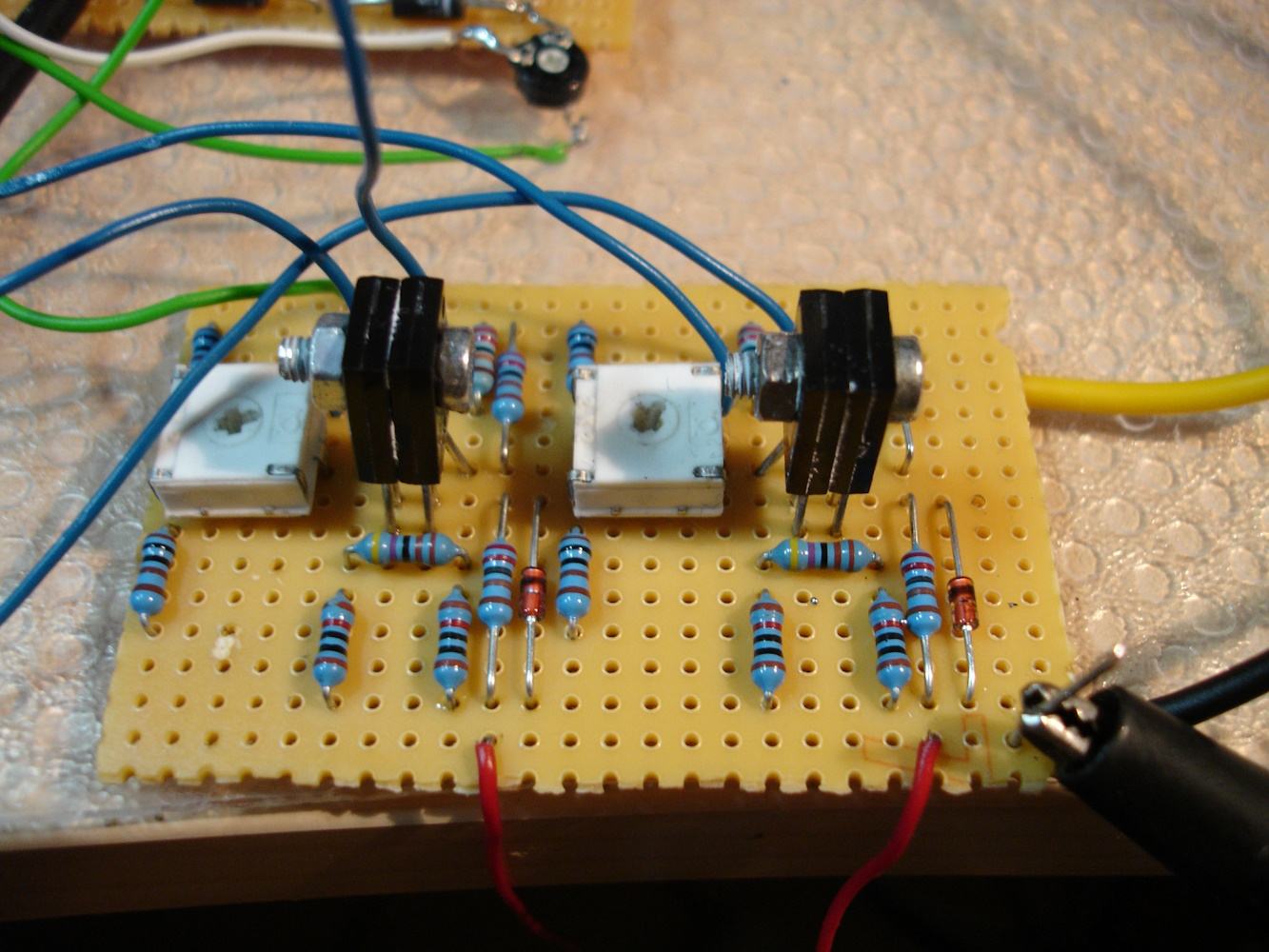
Ablenkverstärker |
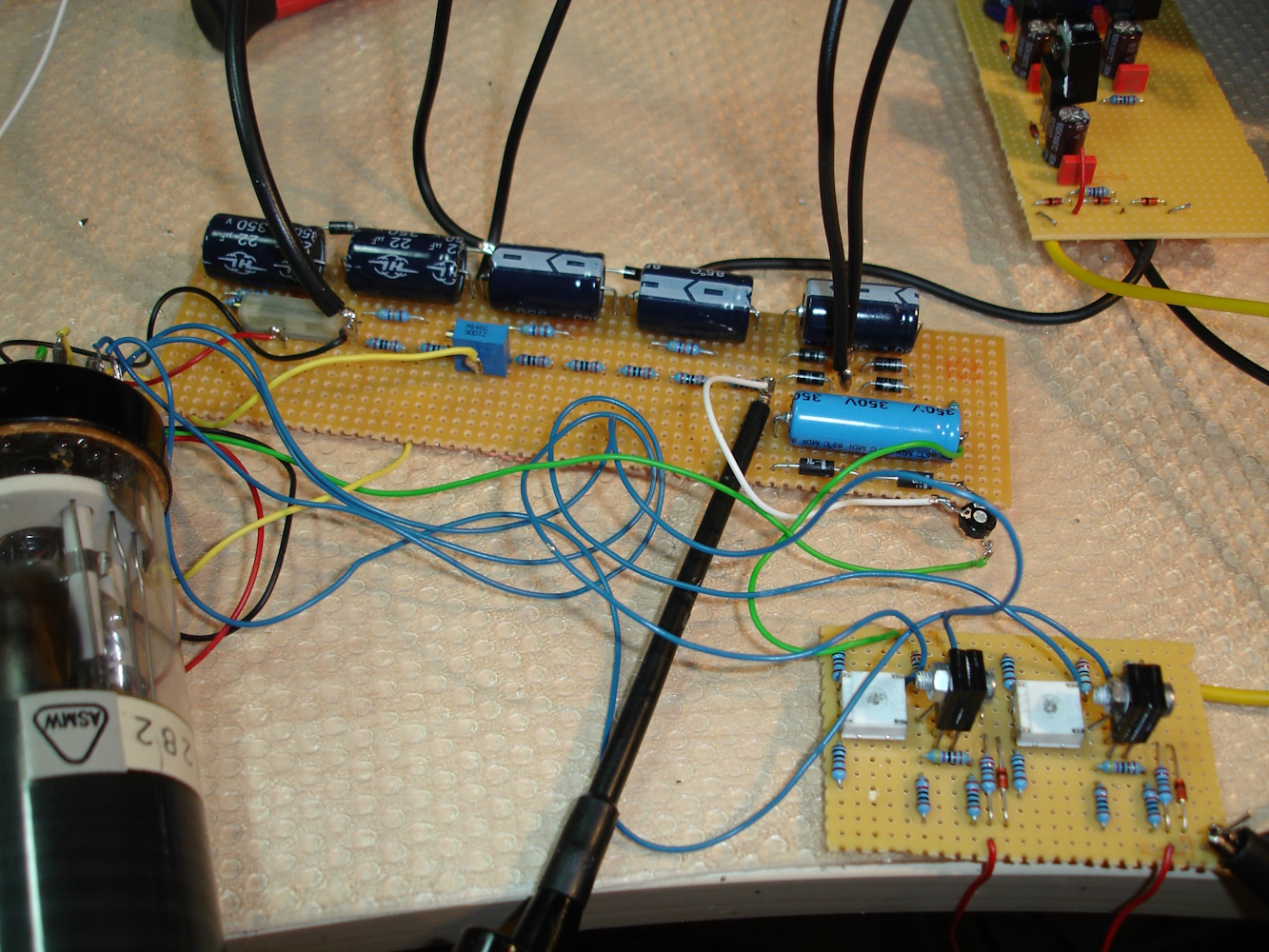
nochmals geänderter Hochspannungsteil |
erstes Licht |
sauberer Fokus |
Erste Version der Uhr
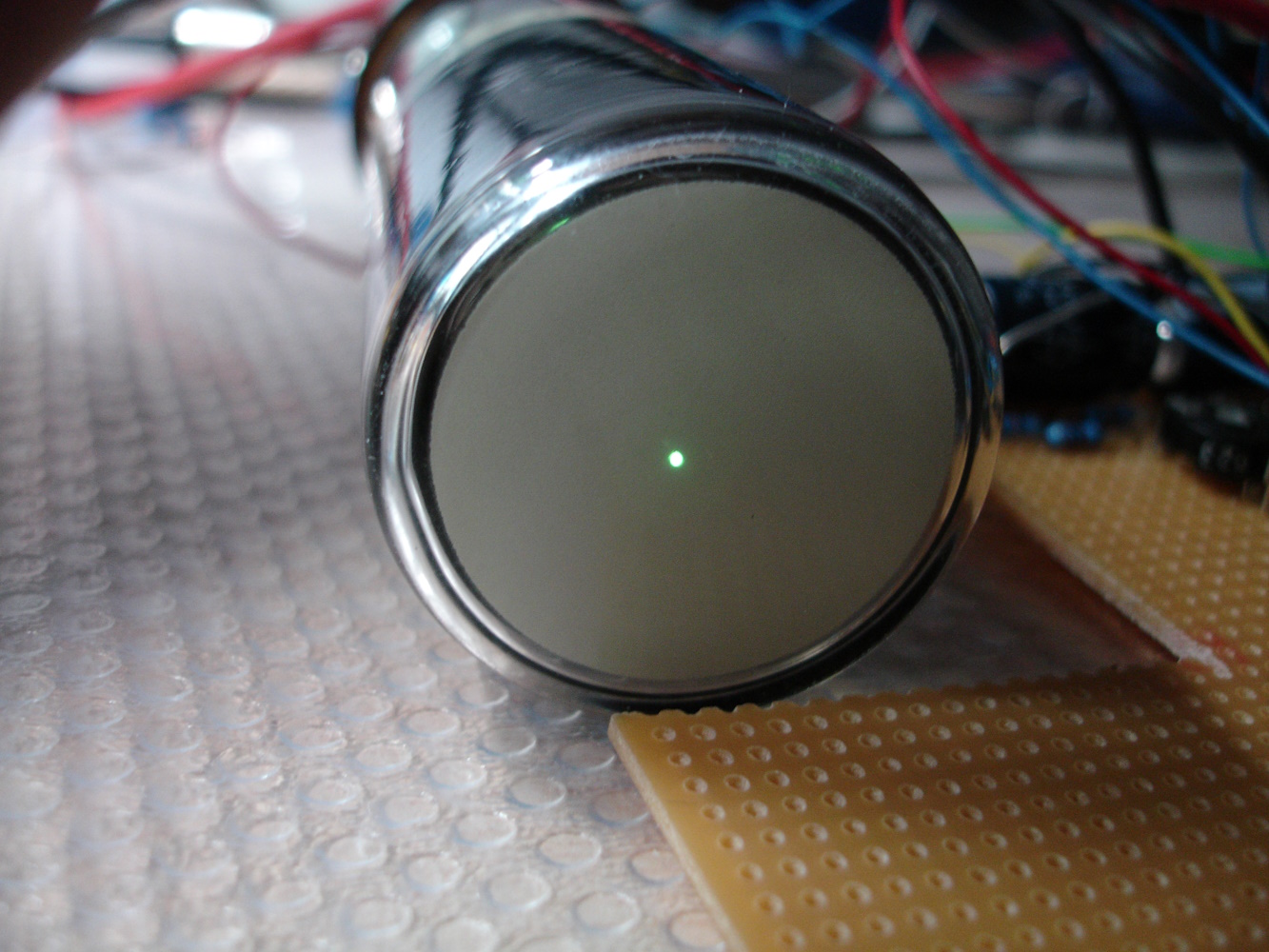
Nachdem die analogen Grundlagen funktionierten, habe ich die Controllerschaltung aus dem ursprünglichen Projekt auf Lochraster aufgebaut und mit der 50 Hz-Software programmiert.

Darstellung der Uhrzeit |

Darstellung der Uhrzeit |
Allerdings zeigten sich relativ schnell einige Probleme:
Das Bild wurde leicht verzerrt dargestellt – vermutlich aufgrund
einer nichtlinearen Ablenkung in einer Achse.
Zusätzlich hing sich die Software nach etwa zwei Minuten Laufzeit
reproduzierbar auf.
Damit war klar: So würde das nichts auf Dauer – es musste eine andere Basis her.
Zweiter Anlauf
Auf der Suche nach einer stabileren Lösung bin ich auf folgendes Projekt gestoßen: Scope-Clock auf Jogis Röhrenbude.
Auf dieser Webseite werden eine ganze Reihe von wirklich tollen Röhrenprojekten in Form von Leserbriefen veröffentlicht.
So auch ein Scope Clock Projekt mit einer anderen Röhre, und vor allem war eine fertig entwickelte Platine relativ günstig verfügbar.
Die sehr gute Beschreibung erleichterte den Aufbau erheblich.
Des Weiteren habe ich den Controller und die Software entsprechend einer Erweiterung
angepasst, welche von Erhard Schemainda beschrieben wurde.
Dabei wurde u.a. die Bildwiederholfrequenz von 25 Hz auf 50 Hz erhöht.
Erhard Schemaindas Seite ist leider nicht mehr online – die Umsetzung funktionierte auf Anhieb.
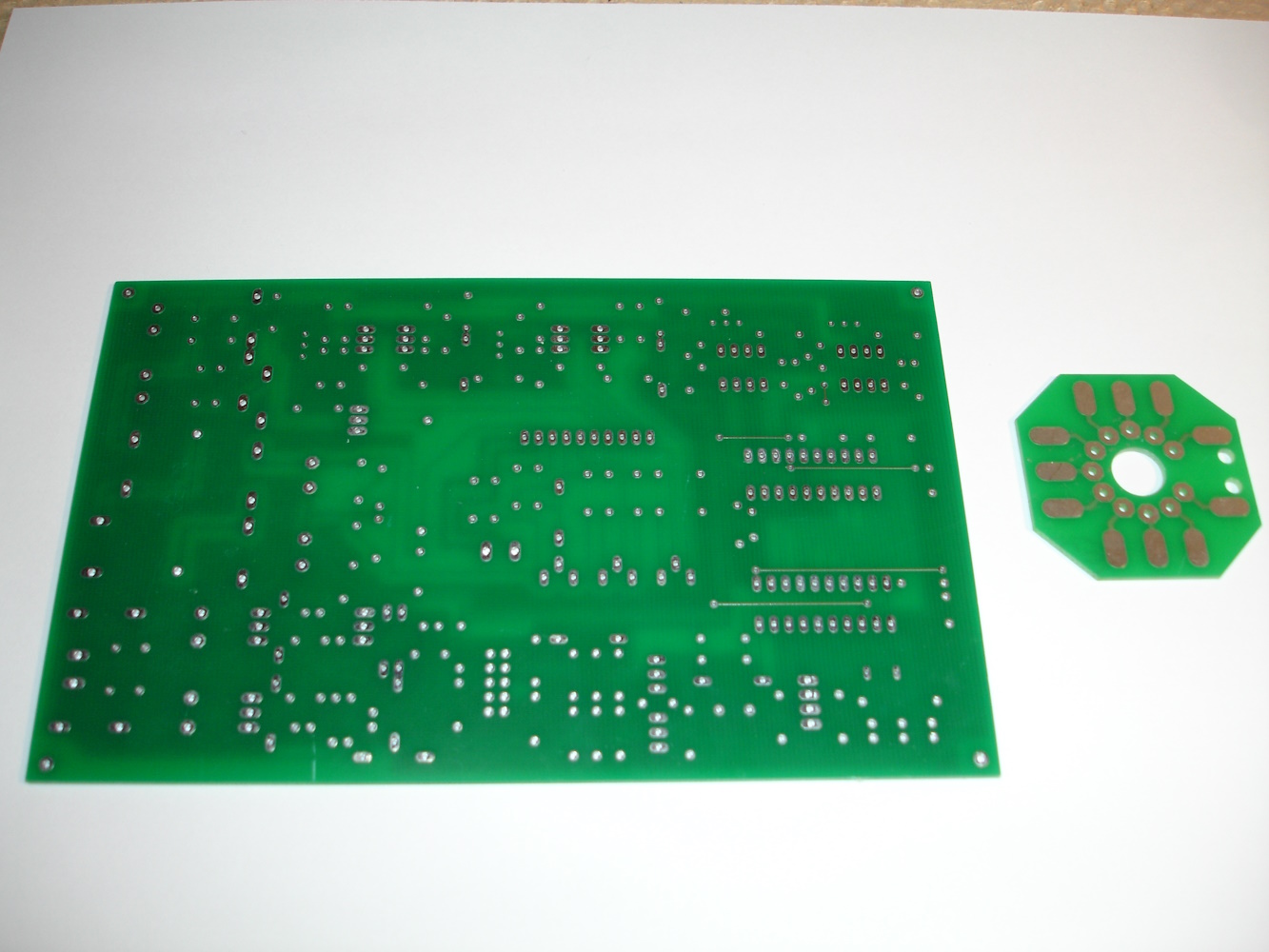
Platinen unbestückt |
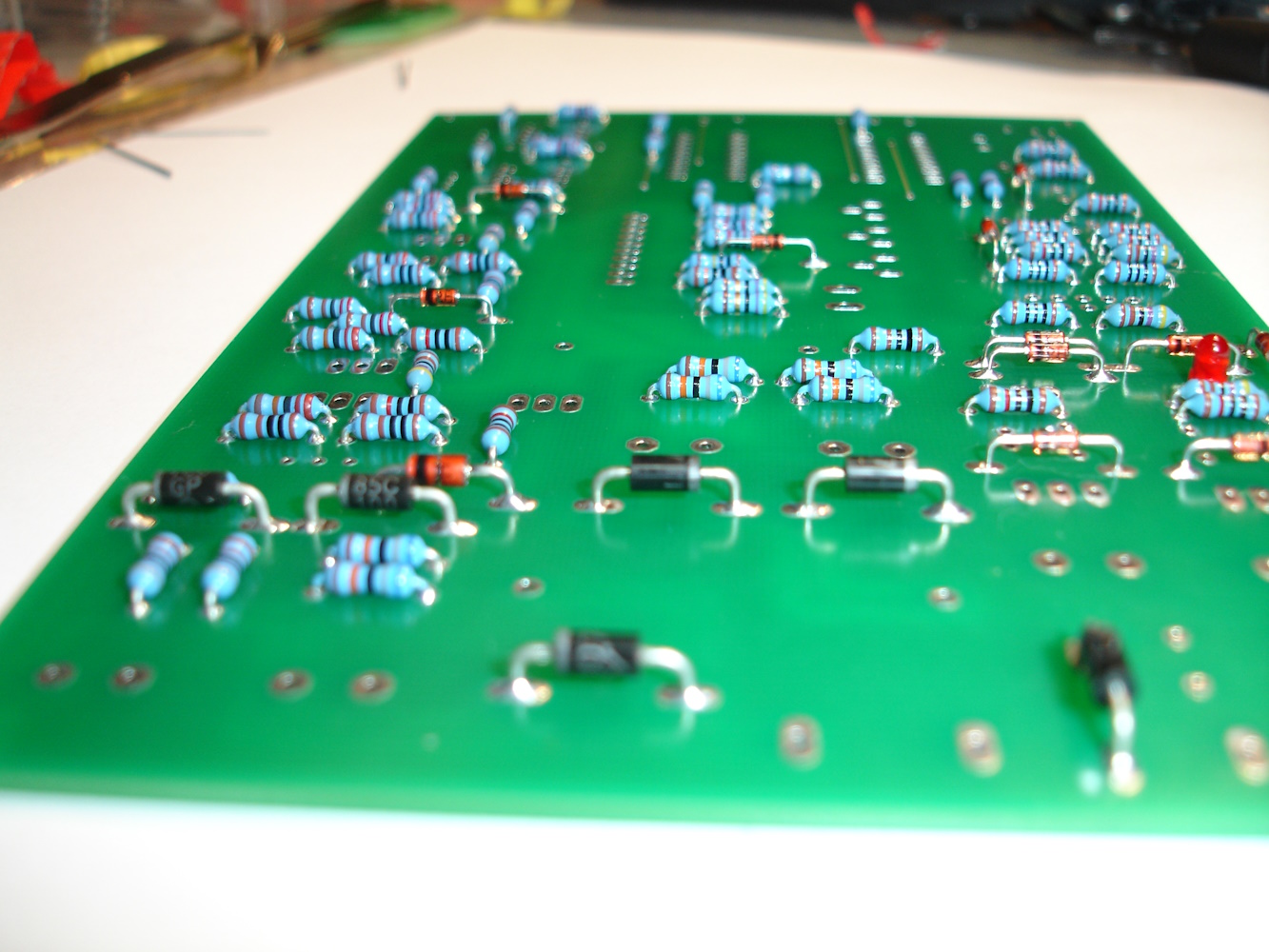
Platine R's und D's |
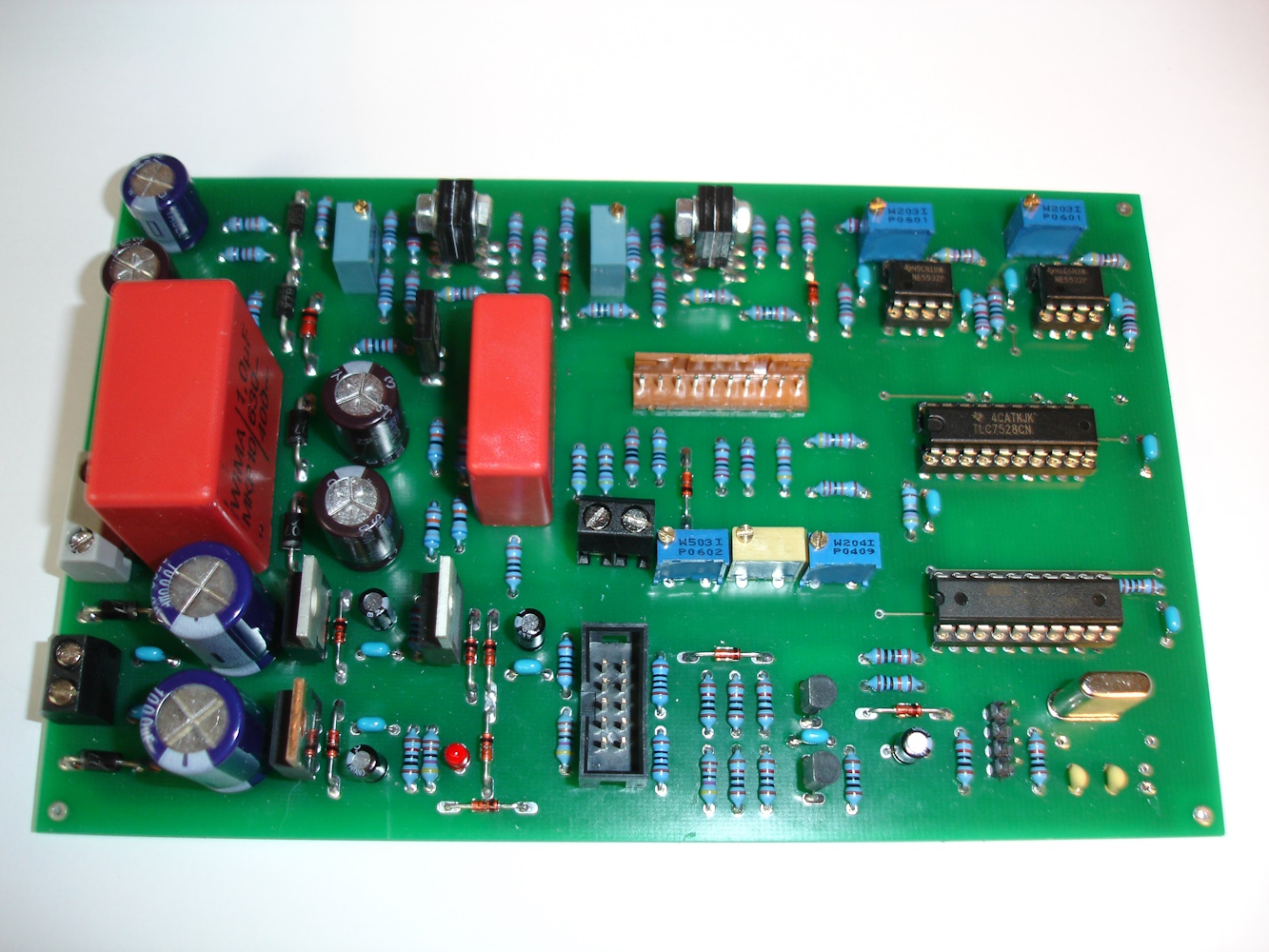
voll bestückt |
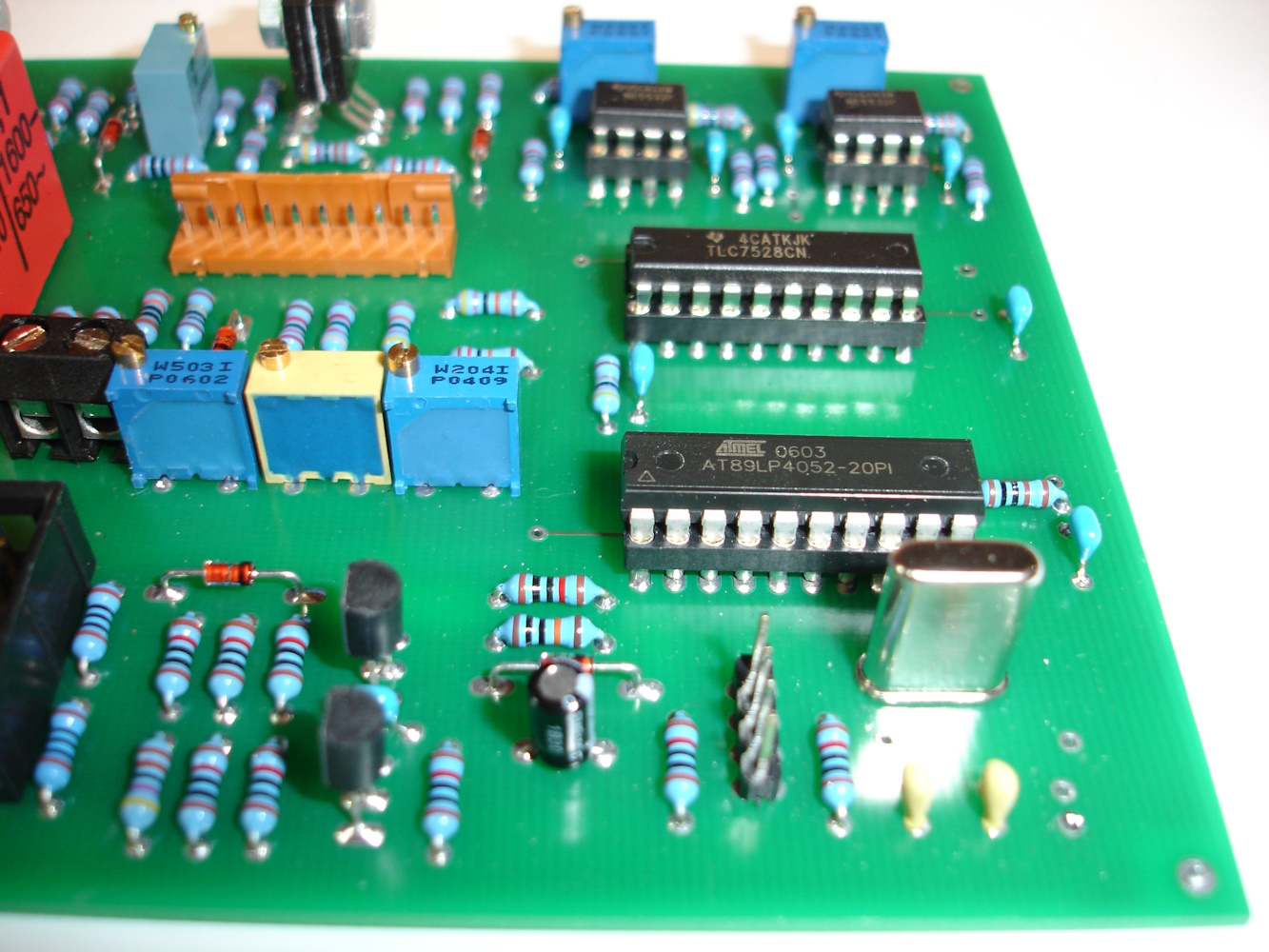
mit alternativem Controller |
Und wieder das Gehäuse…
Elektrisch funktionierte die Uhr nun einwandfrei – wie schon bei früheren Projekten blieb allerdings das Thema Gehäuse erst einmal liegen. Nach rund 20 Jahren wurde es dann aber doch Zeit, der Uhr ein passendes Zuhause zu spendieren :-).
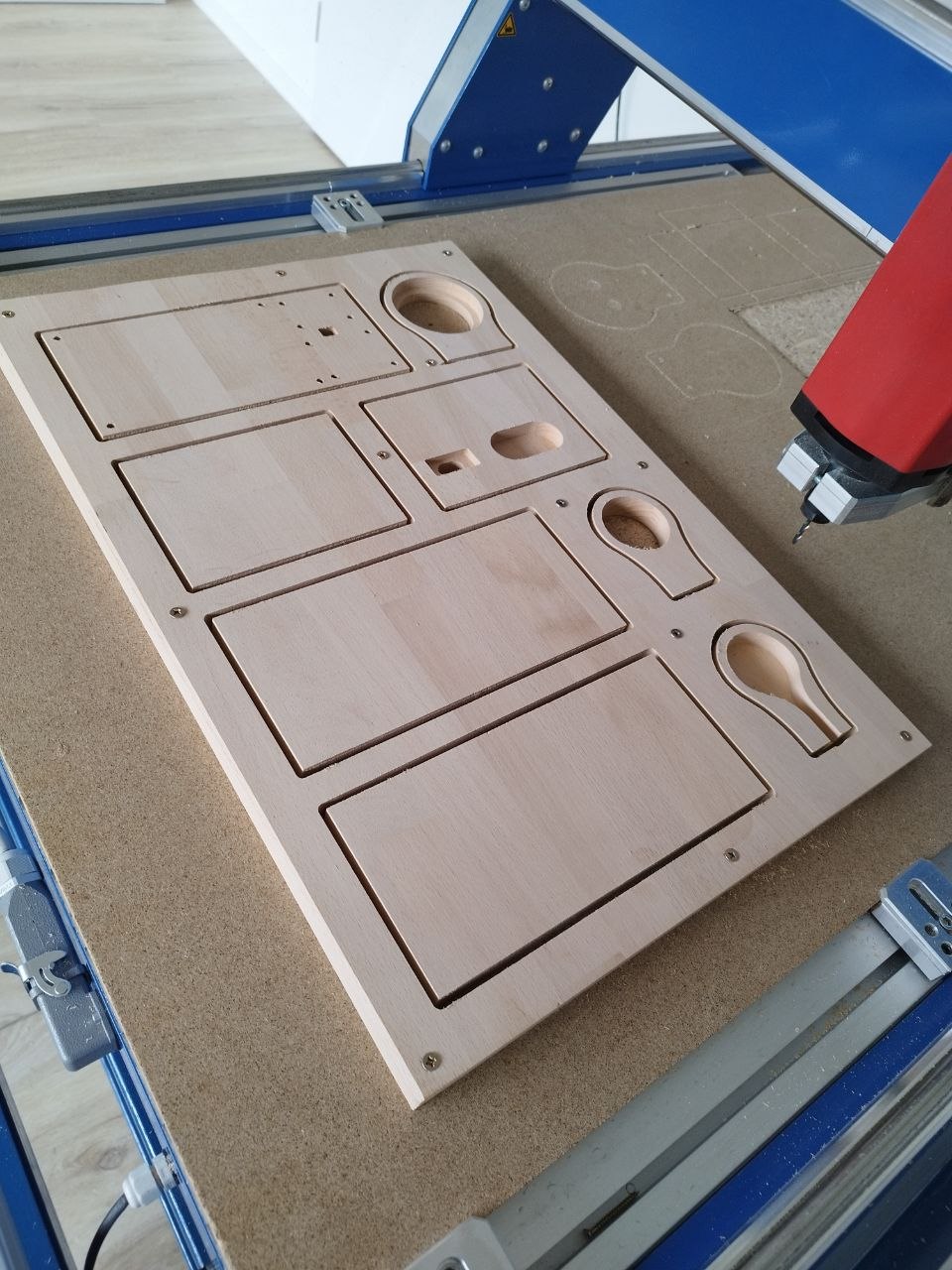
Buche auf der Fräse |

Anprobe |
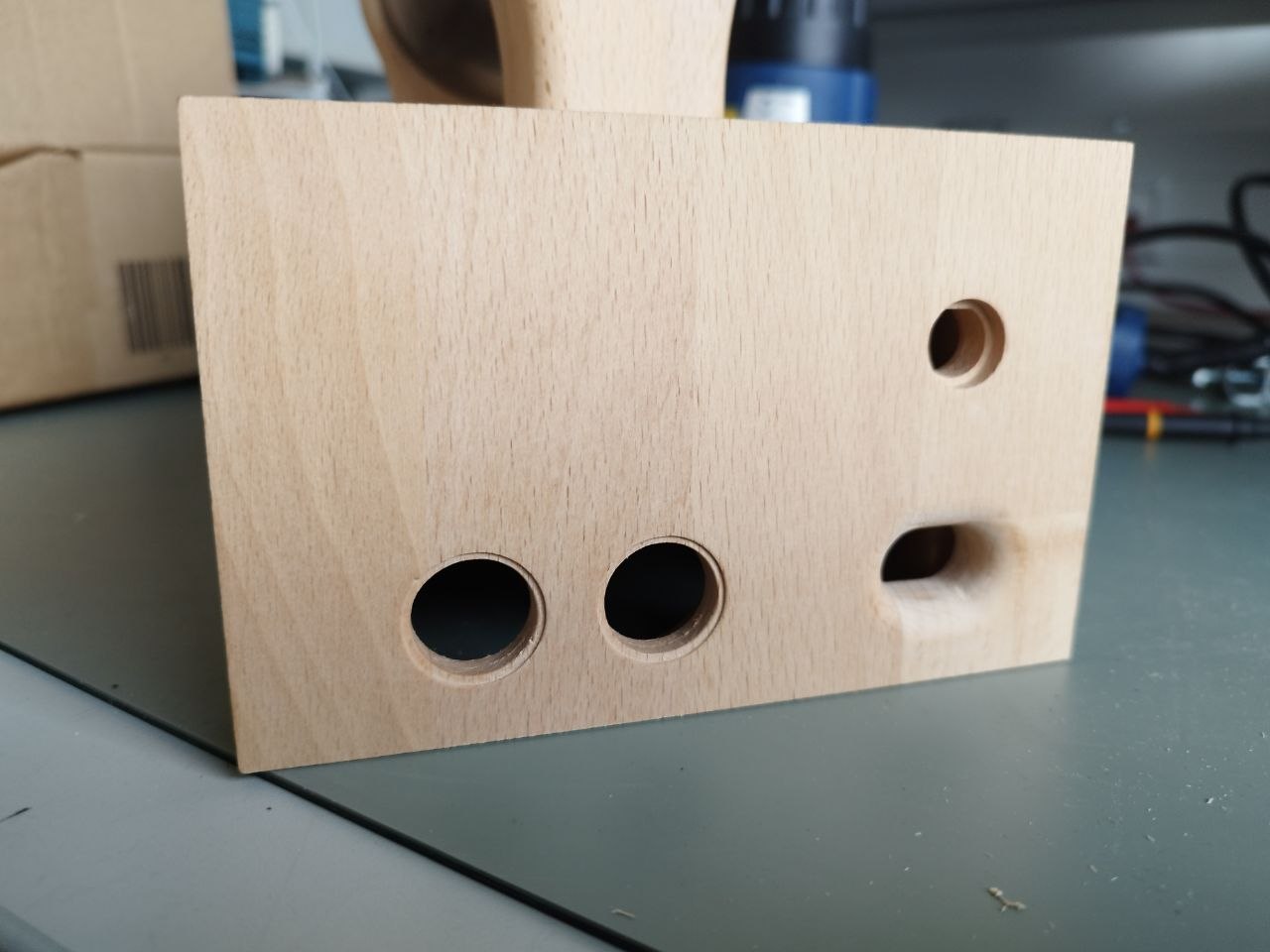
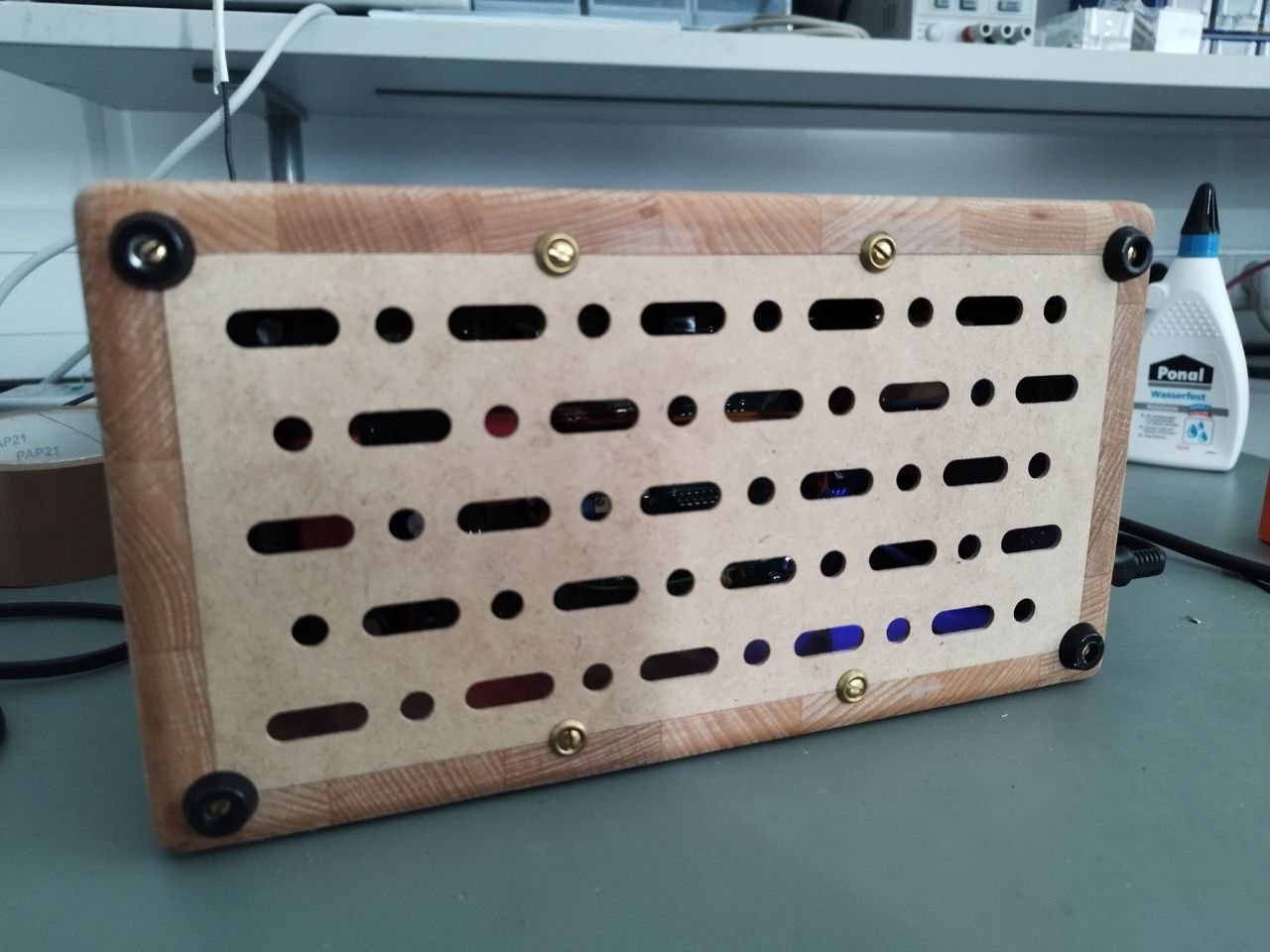
Rückseite |
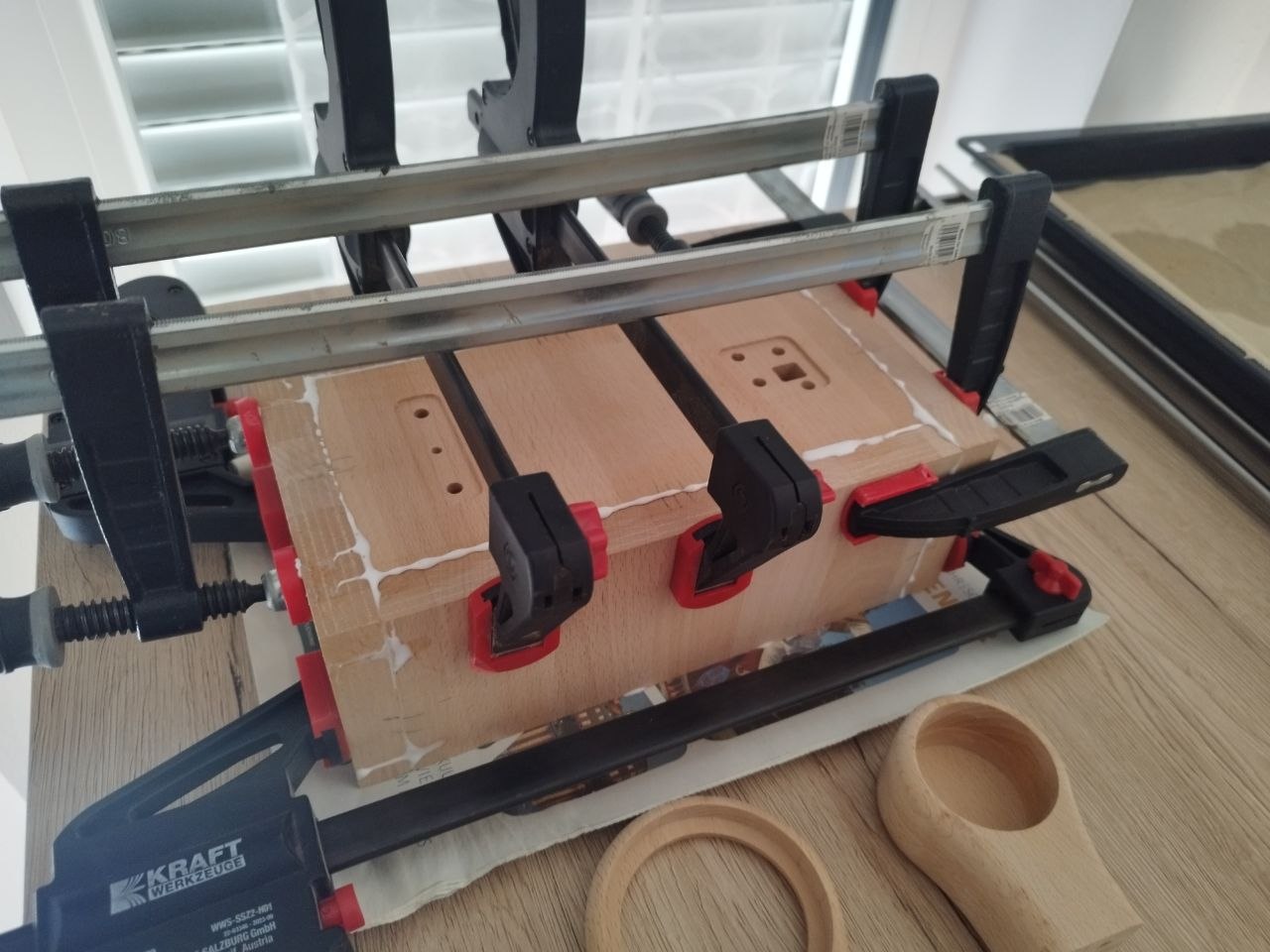
Verleimen |

Kanten abgerundet |

Kanten abgerundet Rückseite |

geölt |

Einbau der Elektronik |
Berührungsschutz |

Rückseite mit Tastern und Feinsicherung |
Zeitsynchronisation und Webinterface
Auch dieser Uhr habe ich eine moderne Art der Zeitsynchronisation spendiert.
Dabei kommt die gleiche ESP-Platine zum Einsatz, wie bei der Nixie-Uhr.
Lediglich die Software wurde dafür etwas angepasst:
Anstelle eines NMEA-Telegramms wird nun ein DCF77-Signal simuliert.
ESP8266-Software
|
interaktive Demo des Webinterfaces |
Das Webinterface besteht derzeit aus vier Seiten. Je nachdem, ob der ESP mit dem Internet verbunden ist, kann der dargestellte Inhalt variieren. Im iFrame links wird der STA-Mode simuliert, also die Ansicht bei bestehender Internetverbindung. Viel Spaß beim Klicken. :-)
|
Mechanische und elektrische Anpassungen
Die verwendete Röhre reagiert recht empfindlich auf das Erdmagnetfeld. Dadurch ist es notwendig, bei einem Standortwechsel einige Einstellungen nachzuführen. Dieser Effekt war mir eigentlich schon bekannt, ich wusste aber noch nicht wie störend ich das emfinden würde, die Potis jedes Mal von der Unterseite bedienen zu müssen.
So entschied ich mich, nachdem das Gehäuse im Prinzip schon fertig war, die Potis von außen zugänglich zu machen. Betroffen sind X und Y Size sowie X und Y Shift. Aufgrund der vergleichsweise geringen Durchfahrtshöhe der Fräse war die Aufspannung des fertigen Gehäuses recht abenteuerlich.

sehr wenig Platz |
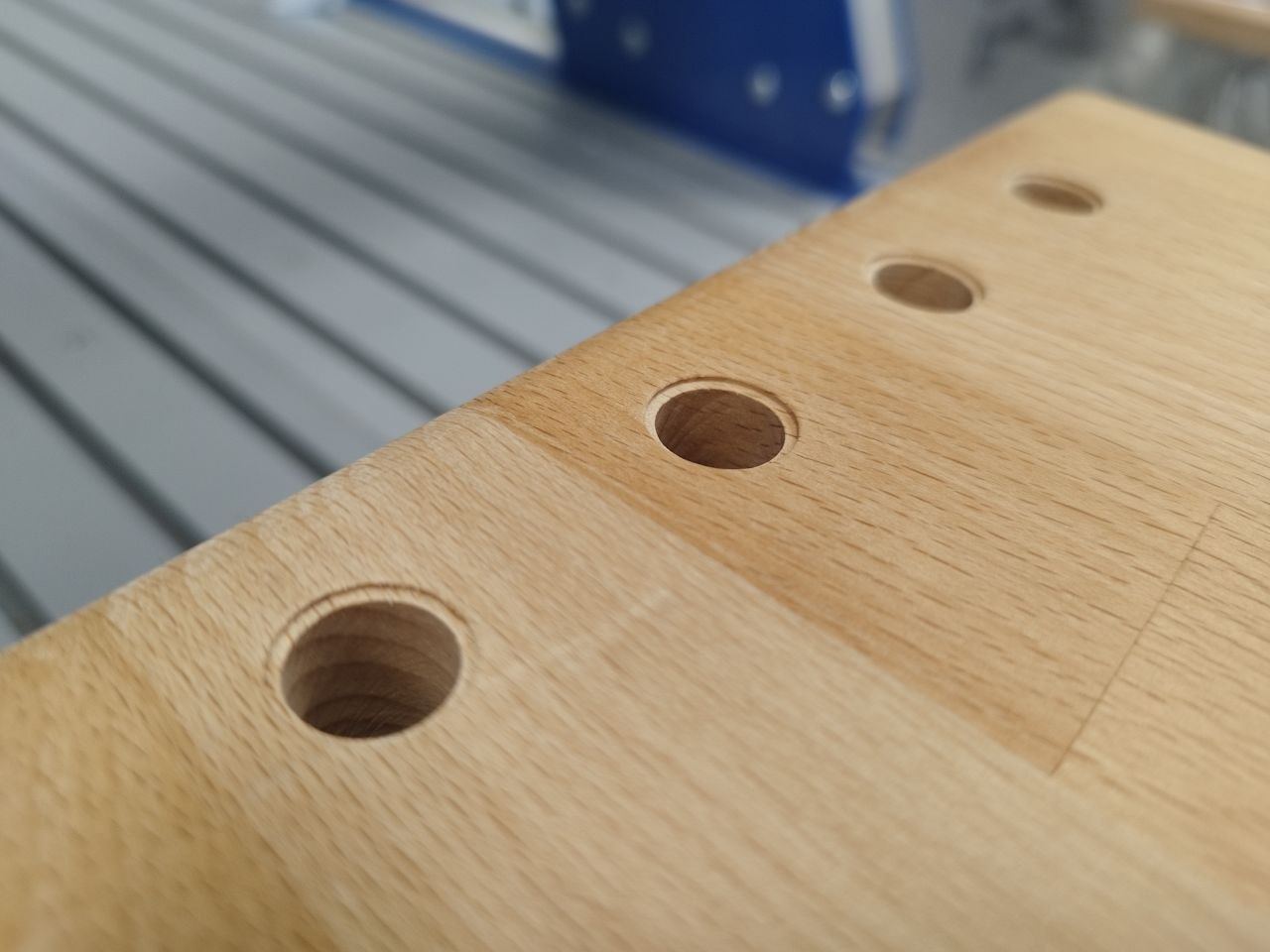
Löcher für die Potis |
Die ursprünglich verbauten 20-Gang-Spindeltrimmer wurden durch 10-Gang-Potis ersetzt.
Durch die Reduktion der Ganganzahl musste ich die Potis genauer an den tatsächlich benötigten Regelbereich anassen, um die gleiche Feinfühligkeit wie mit den Spindeltrimmern zu erreichen. Die jeweiligen Minimal- und Maximalwerte wurden dabei experimentell ermittelt.
Bei den Size-Potis wurde der kleinste benötigte Wert bereits als fester Widerstand
vorgeschaltet, sodass das Poti nur noch den verbleibenden Bereich bis zum Maximalwert abdecken muss.
Die Werte sind Dabei:
R10 (ursprünglich 20k) jetzt ... mit ... Vorwiderstand (noch einzutragen!!!)
R14 (ursprünglich 20k) jetzt ... mit ... Vorwiderstand (noch einzutragen!!!)
Bei den Shift-Potis wurde der nicht benötigte Einstellbereich symmetrisch ausgelagert und der Wert des Potis entsprechend verkleinert.
Die Werte sind Dabei:
R27 und R33 (ursprünglich 1k) jetzt ... und R31 (ursprünglich 2k) jetzt ... (noch einzutragen!!!)
R37 und R43 (ursprünglich 1k) jetzt ... und R41 (ursprünglich 2k) jetzt ... (noch einzutragen!!!)
So eine Holzplatte ist natürlich viel zu dick für die Verschraubung eines Potis. Der nachträgliche Einbau machte es auch unmöglich Vertiefungen auf der Innenseite einzufräsen. So hat mir, Dieter Freind, passende Adapterhülsen aus Messing dafür gedreht - vielen Dank dafür.

|

|
